
Online supplementary material
Cooperative multi-robot box pushing inspired by human behaviour
Group Transportation of Miniature Mobile Robots
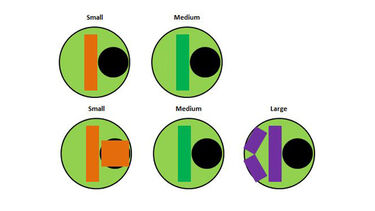
Vision-based segregation behaviours in a swarm of autonomous robots
We study a simple algorithm inspired by the Brazil nut effect for achieving segregation in a swarm of e-puck robots. The algorithm lets each agent mimic a particle of a certain size.
The segregation task requires the swarm to self-organise into a spatial arrangement in which the agents are ranked by particle size (distance to centre).
We show that the mean percentage of errors in rank decreases as the particles' size ratio increases.
Images and overview of experiments performed
Experiment summary (PDF, 6.69MB)
Video material (all 16 times real speed)
Experiment with 14 robots mimicking eight small particles and six medium particles (size factor 1.6)
Control experiment with 14 robots mimicking 14 identical particles (size factor 1.0)
Markers used
1. M. Prize and R. Groß, Vision-based segregation behaviours in a swarm of autonomous robots. Extended Abstract submitted to TAROS 2011