
Group transportation of miniature mobile robots
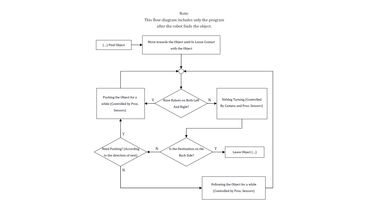
Flow diagram of the intelligence system
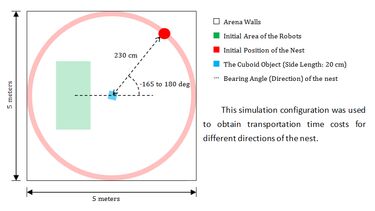
Simulation configuration A
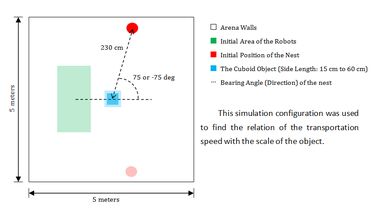
Simulation configuration B
Simulation B1
Nest bearing: 75 deg
Object size: 15cm
Object mass: 225g
Number of robots: 10
This is the smallest object tested in simulation. This object could be effectively transported by three robots only, so more robots will not improve the performance.
Simulation B2
Nest bearing: 75 deg
Object size: 30cm
Object mass: 900g
Number of robots: 12
A large object successfully transported with the cooperation of several robots.
If the LED on the back of a robot is flashing, it means that the robot is following the object rather than pushing the robot.
Simulation A1
Nest bearing: -30 deg
Object size: 20cm
Object mass: 400g
Number of robots: 12
This video shows a failure mode occurred frequently only when the bearing of the nest is -30 deg. By observing the simulation, it was concluded that this failure mode was caused by a small flaw within the intelligence system, though this system works most of the time.
This phenomenon somehow reveals that tiny problems of the single unit will eventually influence the behaviour of the whole swarm in an amplified way.
However, all problems were not corrected in order to maintain validity of all data collected in the experiment.
Simulation A2
Nest bearing: 30 deg
Object size: 20cm
Object mass: 400g
Number of robots: 10
Although the bearing of the nest is 30 deg, which is a bilateral symmetry position of the test in D1, the flaw mentioned previously didn't appear.
In this simulation, some other functions of the simulator are demonstrated such as monitoring the reading of the proximity sensors.
Simulation A3
Nest bearing: 75 deg
Object size: 20cm
Object mass: 400g
Number of robots: 10
The summary of this behaviour is that robots will simply aggregate at the correct side of the object and then push.
The next step of this project is to implement this behaviour on the real system. With the progress of this project, many improvements will be applied and the task will become more complex.