
Multi-Operator Control of Connectivity-Preserving Robot Swarms Using Supervisory Control Theory
Genki Miyauchi, Yuri Kaszubowski Lopes and Roderich Groß
Abstract
Involving human operators to support swarms of robots can be beneficial to address increasingly complex scenarios. However, the shared control between multiple operators remains a challenge, especially where communication between the operators is not available.
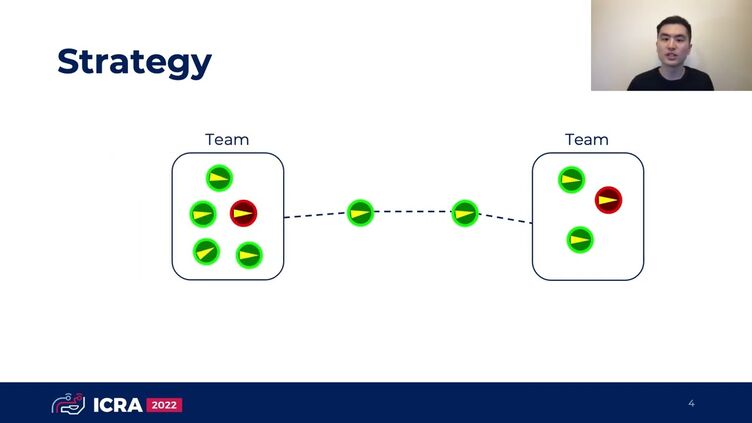
This paper studies the problem of forming a dynamic chain of robots connecting two operators moving within an environment. The robot chain enables operators to share information and robots among themselves. Based on supervisory control theory, we propose a distributed solution which formally guarantees that the deployed robot controllers match the modeled specifications.
We validate the controllers through simulations with groups of up to 40 mobile robots in an environment with obstacles, demonstrating the feasibility of the approach.
Highlight video
Presentation video
Extended models
The extended models based on supervisory control theory can be found here