
Probabilistic Supervisory Control Theory (pSCT) applied to swarm robotics
Yuri K Lopes, Stefan M Trenkwalder, Andrè B Leal, Tony J Dodd and Roderich Groß
Abstract
Swarm robotics studies how large groups of robots can solve relatively complex tasks cooperatively. Much of the source code developed for swarm robotics is done in an ad-hoc manner, which is difficult to verify.
In previous work, we use supervisory control theory to tackle this problem, but any probabilistic based strategy could not be formally represented by the regular SCT. The use of probabilistic generators found in literature does not cover the implementation of modular supervisors.
In this paper we proposed an extended representation of probabilistic generators that allows the implementation of controllers using modular supervisors obtained through the probabilistic supervisory control theory (pSCT) framework.
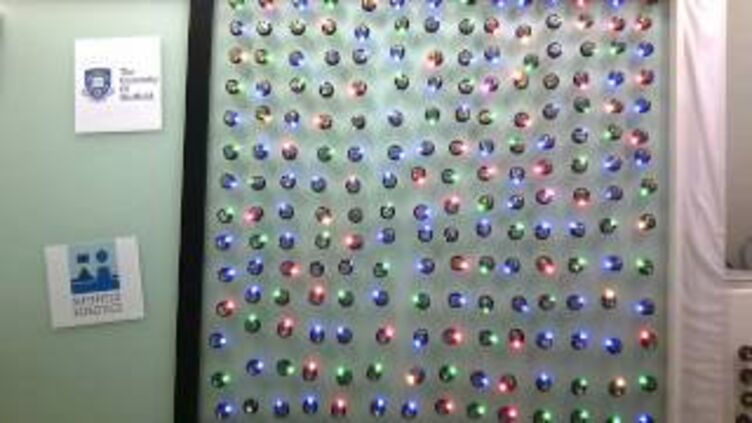
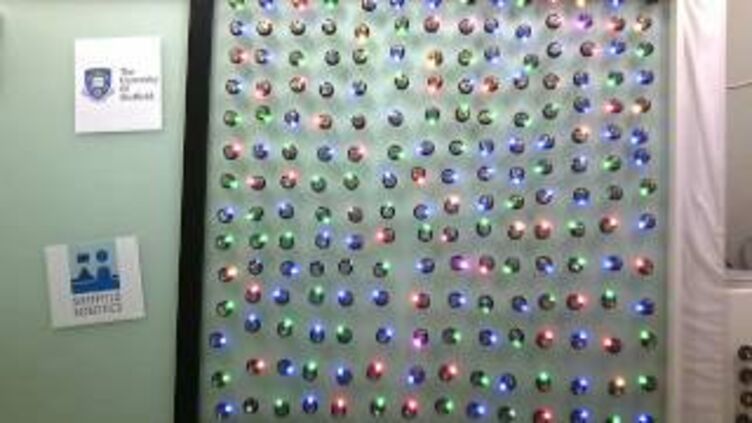
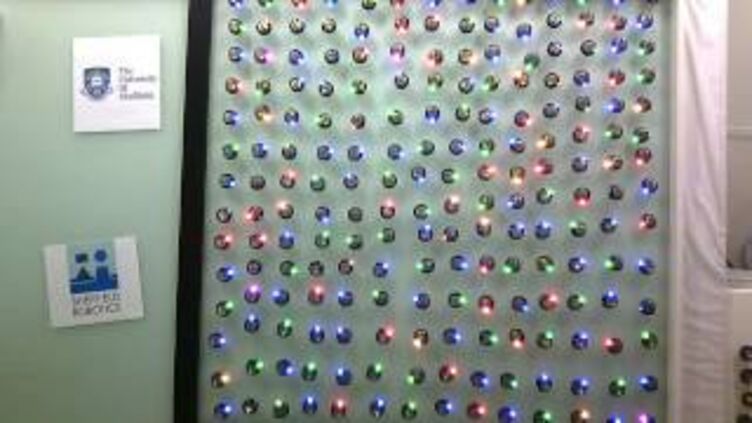
We specify a distributed swarm behaviour based on the graph colouring problem using pSCT and automatically generated the controller's code. We present experiments with 196 physical robots to evaluate the approach.
Videos of physical experiments
Videos are speed up by 3.5 times.
- Trial 1
-

- Trial 2
-
- Trial 3
-
- Trial 4
-

- Trial 5
-

- Trial 6
-
- Trial 7
-

- Trial 8
-

- Trial 9
-

- Trial 10
-

Nazdoru
Nadzoru is an open-source development tool for supervisory control synthesis. With a user-friendly GUI, models can be created, analysed and simulated.
The source code of controllers can be automatically generated. By changing the templates, this tool can generate code for different devices from the same model.
Nadzoru models for the graph colouring case study
View and download the graph colouring models, specifications and operational procedures code.