Segregation in swarms of e-puck robots based on the Brazil Nut effect
Abstract
When a mixture of particles with different attributes undergoes vibration, a segregation pattern is often observed. For example, in muesli cereal packs, the largest particles, the Brazil nuts, tend to end up at the top. For this reason, the phenomenon is known as the Brazil nut effect.
In previous research, an algorithm inspired by this effect was designed to produce segregation patterns in swarms of simulated agents that move on a horizontal plane.
In this paper, we adapt this algorithm for implementation on robots with directional vision. We use the e-puck robot as a platform to test our implementation.
In a swarm of e-pucks, different robots mimic disks of different sizes (larger than their physical dimensions).
The motion of every robot is governed by a combination of three components:
- Attraction towards a point, which emulates the effect of a gravitational pull.
- Random motion, which emulates the effect of vibration.
- Repulsion from nearby robots, which emulates the effect of collisions between disks.
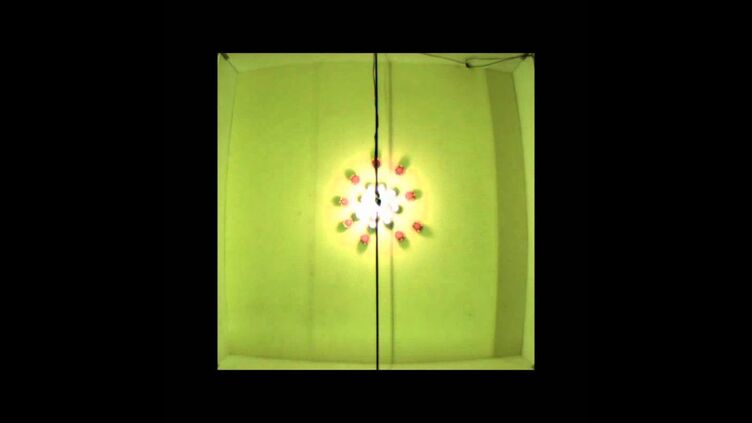
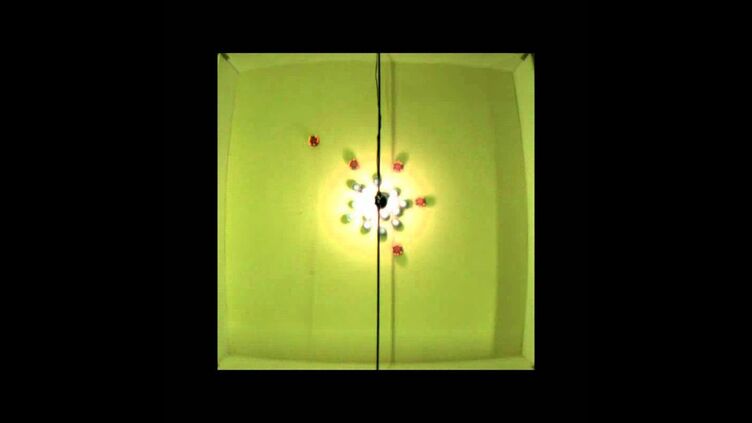
The algorithm does not require robots to discriminate between other robots; yet, it is capable of forming annular structures where the robots in each annulus represent disks of identical size.
We report on a set of experiments performed with a group of 20 physical e-pucks. The results obtained in 100 trials of 20 minutes each show that the percentage of incorrectly-ordered pairs of disks from different groups decreases as the size ratio of disks in different groups is increased.
In our experiments, this percentage was, on average, below 0.5% for size ratios from 3.0 to 5.0. Moreover, for these size ratios, all segregation errors observed were due to mechanical failures that caused robots to stop moving.
Videos