
The Kilobot Soft Robot: A soft-bodied modular reconfigurable robotic system
Federico Pratissoli, Andreagiovanni Reina, Yuri Kaszubowski Lopes, Carlo Pinciroli, Stefan Balan, Lorenzo Sabattini and Roderich Groß
Abstract
We investigate how reliable movement can emerge in aggregates of highly error-prone individuals. The individuals - robotic modules - reside in a planar environment and move stochastically using vibration motors. By coupling them via elastic links, soft-bodied aggregates can be created. We present distributed algorithms based on local sensing that enable the aggregates to reliably move and deform. The algorithms are validated through experiments with aggregates comprising up to 49 physical modules---among the biggest soft-bodied aggregates to date made of fully autonomous robotic modules. The experiments show that the accuracy by which aggregates move increases with the number of modules, and that aggregates with elastic couplings outperform those with no, or rigid, couplings. The findings demonstrate that mechanical couplings can play a vital role in reaching coherent motion among individuals with exceedingly limited and error-prone abilities.
Videos of physical experiments
Straight motion by robots of different size
This experiment quantifies the performance of Kilobot Soft Robots of different sizes when instructed to follow a straight reference trajectory.
The robots are not provided with any feedback by the ARK system and they do not perceive any cues related to the trajectory. In this sense, the robots are assessed in an open-loop setting. However, individual modules still estimate the relative positions among each other, and act accordingly.
Trial videos 1-10
- 1x1 Kilobot Soft Robot
-
1x1 - Trial 1 
1x1 Trial 2 
1x1 Trial 3 
1x1 Trial 4 
1x1 Trial 5 
1x1 Trial 6 
1x1 Trial 7 
1x1 Trial 8 
1x1 Trial 9 
1x1 Trial 10 - 2x2 Kilobot Soft Robot
-
2x2 Trial 1 
2x2 Trial 2 
2x2 Trial 3 
2x2 Trial 4 
2x2 Trial 5 
2x2 Trial 6 
2x2 Trial 7 
2x2 Trial 8 
2x2 Trial 9 
2x2 Trial 10 - 3x3 Kilobot Soft Robot
-

Trial 1 
Trial 2 
Trial 3 
Trial 4 
Trial 5 
Trial 6 
Trial 7 
Trial 8 
Trial 9 
Trial 10 - 4x4 Kilobot Soft Robot
-

Trial 1 
Trial 2 
Trial 3 
Trial 4 
Trial 5 
Trial 6 
Trial 7 
Trial 8 
Trial 9 
Trial 10 - 5x5 Kilobot Soft Robot
-

Trial 1 
Trial 2 
Trial 3 
Trial 4 
Trial 5 
Trial 6 
Trial 7 
Trial 8 
Trial 9 
Trial 10 - 6x6 Kilobot Soft Robot
-
Trial 1 
Trial 2 
Trial 3 
Trial 4 
Trial 5 
Trial 6 
Trial 7 
Trial 8 
Trial 9 
Trial 10 - 7x7 Kilobot Soft Robot
-
Trial 1 
Trial 2 
Trial 3 
Trial 4 
Trial 5 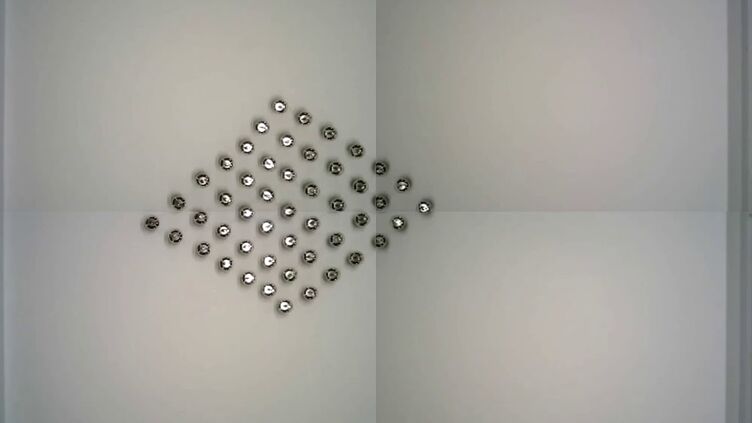
Trial 6 
Trial 7
Trial 8 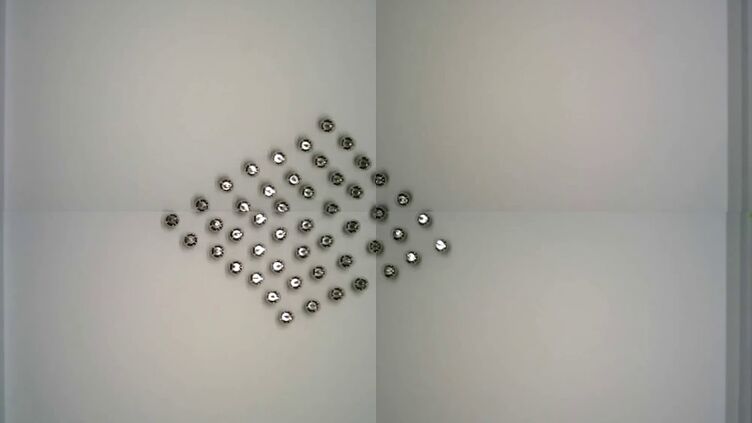
Trial 9 
Trial 10
Trajectory following
This experiment quantifies the performance of Kilobot Soft Robots when instructed to follow a predefined, curved trajectory.
The frontal module is provided with feedback from the ARK system. At two second intervals, it receives one bit of information, indicating whether the reference trajectory is to the left or to the right of the robot (its CoM) with respect to its direction of motion.
Trial videos 1-5
- 3x3 Kilobot Soft Robot
-
Trial 1 
Trial 2 
Trial 3 
Trial 4 
Trial 5
Changing shape while following a reference trajectory
This experiment quantifies the performance of the Kilobot Soft Robot when instructed to deform its body while following a predefined trajectory. The robot is required to first advance in its default shape, then shrink and finally expand again, to restore its original shape.
Each module receives two signals by the ARK system, indicating when the corresponding shape changes are to be triggered. In addition, the frontal module receives, at two second intervals, one bit of information, indicating whether the reference trajectory is to the left or to the right of the robot (its CoM) with respect to its direction of motion.
Trial videos 1-11
- 4x4 Kilobot Soft Robot
-
Trial 1 
Trial 2 
Trial 3 
Trial 4 
Trial 5 
Trial 6 
Trial 7 
Trial 8 
Trial 9 
Trial 10 
Trial 11
Robots with different link rigidity
Finally, we examine the role of the mechanical coupling on the performance of Kilobot Soft Robots. We perform a control experiment where Kilobot Soft Robots have their elastic links replaced with rigid links of equivalent weight. The Kilobots run the same algorithm as used in the experiments with elastic links.
Trial videos 1-10
- 3x3 Kilobot Soft Robot
-
3x3 Trial 1 
3x3 Trial 2 
3x3 Trial 3 
3x3 Trial 4 
3x3 Trial 5 
3x3 Trial 6 
3x3 Trial 7 
3x3 Trial 8 
3x3 Trial 9 
3x3 Trial 10