Decentralised pose control of modular reconfigurable robots operating in liquid environments
Joāo Amorim Marques, Anıl Özdemir, Matthew J Doyle, Daniela Rus and Roderich Groß
Abstract
Modular reconfigurable robots are touted for their flexibility, as their bodies can assume a wide range of shapes. A particular challenge is to make them move efficiently in 3D without compromising the scalability of the system.
This paper proposes decentralised and fully reactive controllers for pose control of 3D modular reconfigurable robots.
The robots operate in liquid environments, and move by routing fluid through themselves. Each module uses only two bits of sensory information per face, and, optionally, up to five bits of information that are exchanged via shared power lines.
We prove that the robots are guaranteed to reach a goal object with a preferred orientation. Using computer simulations of Modular Hydraulic Propulsion robots, all controllers are assessed for different environments, system sizes and noise, and their performances compared against a centralised controller.
Given the simplicity of the solutions, modules could potentially be realised at scales below a millimetre-cube, making it possible to have robots of high spatial resolution perform accurate movements in 3D liquid environments.
Highlight video
Pose control in 3D
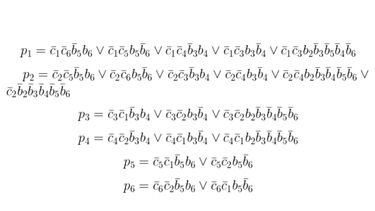
5-bit shared power line (3D-5SP) Boolean expressions.
Under the assumption that b1b2 = 0 ^ b3b4 = 0 ^ b5b6 = 0 the above equations can be simplified to