HyMod: A 3-DOF hybrid mobile and self-reconfigurable modular robot and its extensions
Christopher Parrott, Tony J Dodd and Roderich Groß
Abstract
This paper presents an overview of HyMod, a hybrid modular robot, and its extensions.
Each HyMod unit features four connectors and three rotational degrees of freedom, enabling it to move independently and group with other units to form arbitrary cubic lattice structures.
The design is built around the high-speed genderless (HiGen) connector, allowing for single-sided disconnect and enabling units to rotate freely in place within a lattice position.
An analysis of HyMod is presented, as well as details of the mechanics and electronics of the module.
To augment the capabilities of the HyMod system, a number of extensions are introduced. Hybrid modular robots with extensions, such as the system presented here, could see use in the areas of reconfigurable manufacturing, search and rescue, and space exploration.
Analysis
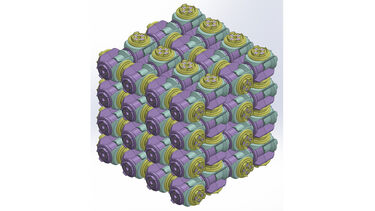
Lattice structures
This image shows how two module HyMod metamodules can form a 4x4x4 cubic lattice structure. The image uses 1/3 models of HyMod, with the same degrees of freedom and number of connectors.
Experiment videos
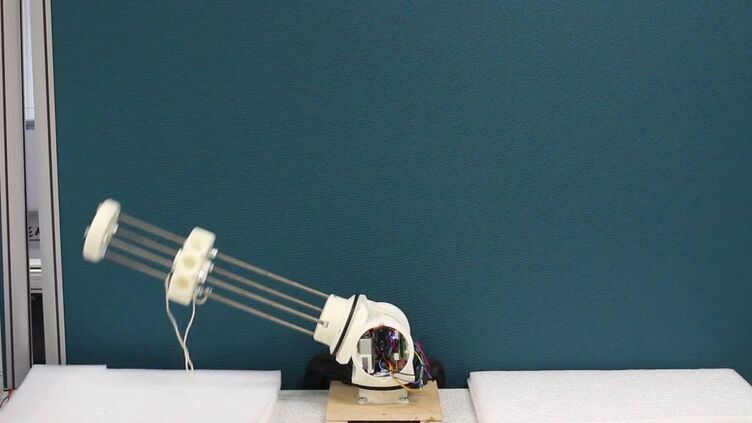
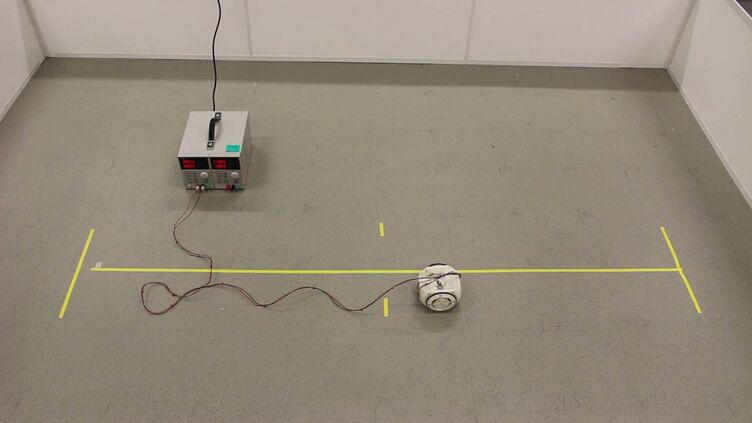
Driving experiment
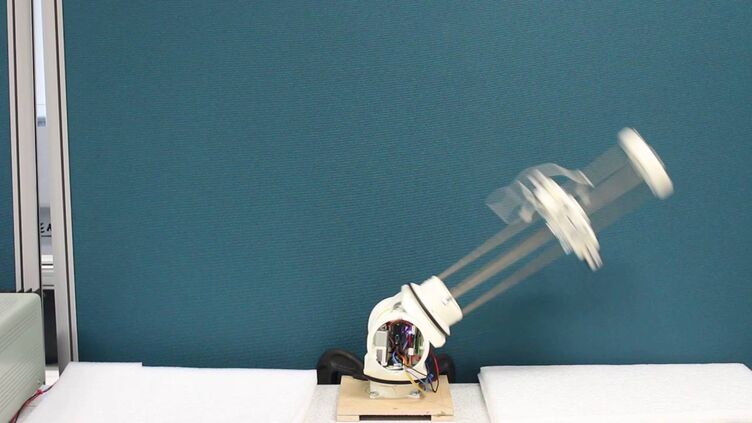
Lifting experiment